- Pixels and Resolution
- Bit Depth, Dynamic Range, and Color
- Gamma and Tone Mapping
From the book
Bit Depth, Dynamic Range, and Color
We use numbers to represent a pixel’s tonal value (how light or dark it is) and its color (red, green, blue, or any of the myriad gradations of the various rainbow hues we can see).
Bit Depth. In a grayscale image, each pixel is represented by some number of bits. Photoshop’s 8-bit/channel mode uses 8 bits to represent each pixel, and its 16-bit/channel mode uses 16 bits to represent each pixel. An 8-bit pixel can have any one of 256 possible tonal values, from 0 (black) to 255 (white), or any of the 254 intermediate shades of gray. A 16-bit pixel can have any one of 32,769 possible tonal values, from 0 (black) to 32,768 (white), or any of the 32,767 intermediate shades of gray. If you’re wondering why 16 bits in Photoshop gives you 32,769 shades instead of 65,536, see the sidebar “High-Bit Photoshop,” on the next page (if you don’t care, skip it).
So while pixel dimensions—the number of pixels—describe the two-dimensional height and width of the image, the bits that describe each pixel produce a third dimension that describes how light or dark each pixel is—hence the term bit depth.
Dynamic Range. Some vendors try to equate bit depth with dynamic range. This is largely a marketing ploy, because although there is a relationship between bit depth and dynamic range, it’s an indirect one.
Dynamic range in digital cameras is an analog limitation of the sensor. The brightest scene information the camera can capture is limited by the capacity of the sensor element. At some point the element can no longer accept any more photons—a condition called saturation—and any photons arriving after saturation are not counted. The darkest shade a camera can capture is determined by the more subjective point at which the noise inherent in the system overwhelms the very weak signal generated by the small number of photons that hit the sensor—the subjectivity lies in the fact that some people can tolerate more noise in their photographs than others.
One way to think of the difference between bit depth and dynamic range is to imagine a staircase. The dynamic range is the height of the staircase. The bit depth is the number of steps in the staircase. If we want our staircase to be reasonably easy to climb, or if we want to preserve the illusion of a continuous gradation of tone in our images, we need more steps in a taller staircase than we do in a shorter one, and we need more bits to describe a wider dynamic range than a narrower one. But more bits, or a larger number of smaller steps, doesn’t increase the dynamic range, or the height of the staircase.
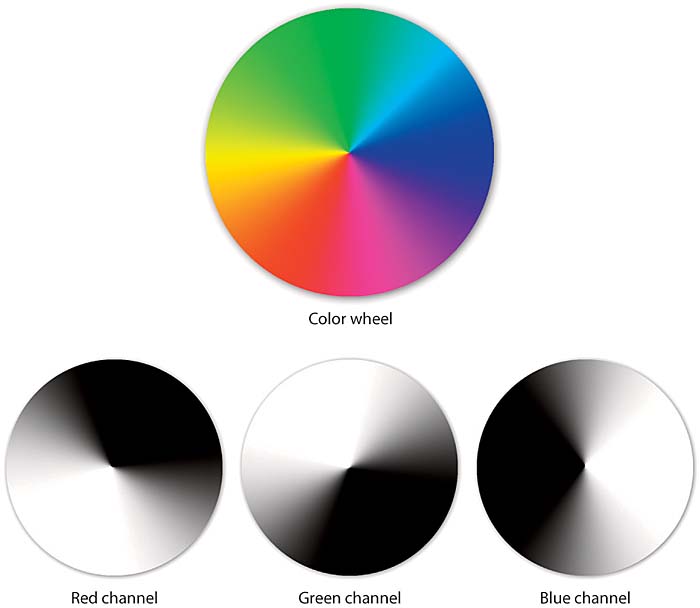
Color. RGB color images consist of three 8-bit or 16-bit grayscale images, or channels, one representing shades of red, the second representing shades of green, and the third representing shades of blue (see Figure 2-2). Red, green, and blue are the primary colors of light, and combining them in different proportions allows us to create any color we can see. So an 8-bit/channel RGB image can contain any of 16.7 million unique color definitions (256 x 256 x 256), while a 16-bit/channel image can contain any of some 35 trillion unique color definitions.
{kind=link}
)
Figure 2-2 The top image is an RGB color wheel where the gradients between red, green, and blue combine to create intermediate hues. Yellow is a combination of red and green, while cyan is made of green and blue. Magenta is the final combination of red and blue channels.
Either of these may sound like a heck of a lot of colors—and indeed they are. Estimates of how many unique colors the human eye can distinguish vary widely, but even the most liberal estimates are well shy of 16.7 million and nowhere close to 35 trillion. Why then do we need all this data?
We need it for two quite unrelated reasons. The first one, which isn’t particularly significant for the purposes of this book, is that 8-bit/channel RGB contains 16.7 million color definitions, not 16.7 million perceivable colors. Many of the color definitions are redundant: even on the very best display, you’d be hard pressed to see the difference between RGB values of 0, 0, 0, and 0, 0, 1 or 0, 1, 0 or 1, 0, 0, or for that matter between 255, 255, 255 and 254, 255, 255 or 255, 254, 255 or 255, 255, 254. Depending on the specific flavor of RGB you choose, you’ll find similar redundancies in different parts of the available range of tone and color.
The second reason, which is extremely significant for the purposes of this book, is that we need to edit our images—particularly our digital raw images, for reasons that will become apparent later—and every edit we make has the effect of reducing the number of unique colors and tone levels in the image. A good understanding of the impact of different types of edits is the best basis for deciding where and how you apply edits to your images.